IQL: Offline Reinforcement Learning with Implicit Q-Learning
IQL的作者之一是:Ilya Kostrikov,也是我们熟知的DRQ的作者。
以及Sergey Levine,SAC和TRPO都与其相关:
老规矩,我们还是先给出阅读本篇论文之前你应该阅读的文章:
- [AWR]:
- [AWAC]:
- [CQL]: 其中CQL并非必须,但是对于理解IQL的一些细节会有帮助。
SARSA
SARSA是一个经典的RL算法,考虑数据集给出的五元组, 它的更新公式如下:
损失函数为:
相比于比较常见的更新时使用四元组,SARSA使用了五元组,这样的好处是可以直接避免了action ood的情况。
TODO: 添加缺点分析
函数拟合?
我们对上面的目标稍作修改:
这里的表示在数据集中的概率大于0,也就是说,我们只考虑数据集中的action。跟之前几篇博文的含义一致,表示行为策略,实际表示的是数据集中的行为分布。
你可能会问这个式子要怎么估计,毕竟未知,我们每次采样的也仅仅是四元组,完全不知道对应的分布。
这个问题也就是IQL的核心问题,一言以蔽之:
函数拟合!!!我们用一个函数拟合,然后用这个函数来更新Q函数。
为了统一表示,我们后文使用来表示。即:
说起来挺简单,但关键就在于如何拟合这个函数。先别急,我们来看一个更加一般化的建模问题。
一般化的建模问题
假设我们现在有一个二元函数 F(x, y),不知道它的具体表达式,现在允许你每次从集合中选取并输入一个二元组(x1, x2),从而获取F(x1, x2)的值。
我们现在想拟合一个函数G(x),使得。
使用神经网络拟合G(x1),假设某一次更新时,假设我们现在拿到一个pair(x1, x2)
- ,那显然G(x1)肯定还需要增大,否则不能满足最大化的要求,此时loss > 0,一个显然的方式是将作为Loss,毕竟值回归用MSE作为损失,简直是太常见了;
- ,那么我们希望此时Loss最好等于 = 0,或者是一个比较小的数值,这是因为此前的更新已经使得G(x1)足够大,不需要再继续增大了。
ok,讲到这里,我们开始引入损失函数:
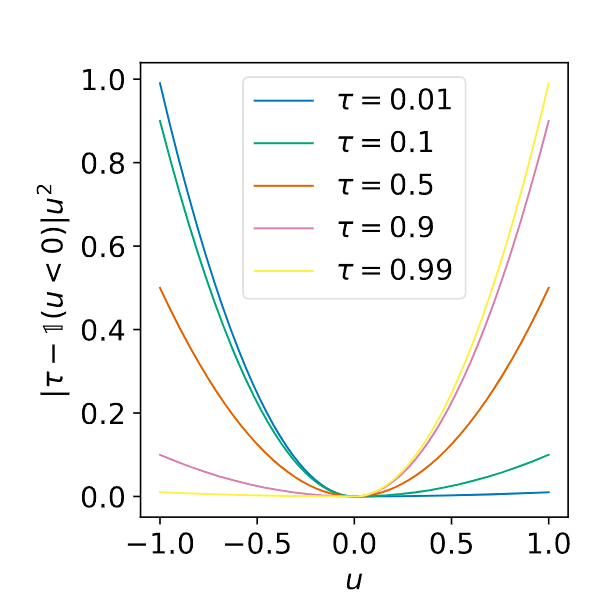
这里的I是指示函数,如果u<0,那么I(u<0)=1,否则I(u<0)=0。当时,这个损失函数就是一个标准的MSE损失函数。当时,这个函数为非对称的MSE。 这里的是一个设定好的超参数,在(0,1)之间,这里的u其实就是我们前面的。
不同的超参数的选取,对损失函数的影响如下:
至此,我们回过头来看看V(s')的拟合问题,你是不是有了一些灵感?
V(s')的拟合
我们的目标是拟合V(s'),使得。
记作V的参数为,则损失:
这里的是数据集,是一个超参数,用来控制对于正负误差的惩罚程度。
所以IQL整体的更新方式,写成batch-update的形式:
def continuous_action_space_update(self, data_batch):
(
obs_batch,
action_batch,
reward_batch,
next_obs_batch,
done_batch,
truncated_batch,
) = itemgetter("obs", "action", "reward", "next_obs", "done", "truncated")(
data_batch
)
reward_batch = reward_batch * self.reward_scale
with torch.no_grad():
q = self.target_q_network([obs_batch, action_batch])
target_q = self.v_network(next_obs_batch)
target_q = reward_batch + self.gamma * (1.0 - done_batch) * target_q
# 1. compute q loss and backward
q1, q2 = self.q_network.both([obs_batch, action_batch])
q_loss = (F.mse_loss(q1, target_q) + F.mse_loss(q2, target_q)) * 0.50
self.q_optimizer.zero_grad(set_to_none=True)
q_loss.backward()
self.q_optimizer.step()
# 2. calculate v loss
v_value = self.v_network(obs_batch)
adv = q - v_value
v_loss = asymmetric_l2_loss(adv, self.tau)
self.v_optimizer.zero_grad(set_to_none=True)
v_loss.backward()
# clip_grad_norm_(self.v_network.parameters(), max_norm=1.0)
self.v_optimizer.step()
# 3. calculate policy loss
exp_adv = torch.exp(self.beta * adv.detach()).clamp(max=EXP_ADV_MAX)
policy_logp = self.policy_network.evaluate_actions(obs_batch, action_batch)[
"log_prob"
]
policy_loss = -torch.mean(exp_adv * policy_logp)
self.policy_optimizer.zero_grad(set_to_none=True)
policy_loss.backward()
self.policy_optimizer.step()
# 4. soft update target network
self.soft_update()
return {
"loss/q_loss": q_loss.item(),
"loss/v_loss": v_loss.item(),
"loss/policy_loss": policy_loss.item(),
"value/q_value": q.mean().item(),
"value/v_value": v_value.mean().item(),
}
除了V的拟合采用了非对称的MSE,Q值的学习在得到V之后就很容易了,而训练得到V和Q之后,参考AWR或者AWAC的思路,我们可以得到一个新的行为策略,这个策略的形式是: ,策略学习的细节部分可以参考AWAC的文章。
实验结果
TODO: 补充自己的实验效果
总结
IQL的核心思想是通过拟合一个函数V(s')来近似,从而避免了action ood的问题。拟合的方式采用了非对称的MSE,通过调整超参数来控制对于正负误差的惩罚程度。
终极奥义:一个最大化的函数拟合,非对称的MSE!
使用非对称的MSE并不是唯一的解决方案,直观上很好理解。而在XQL中我们会看到理论结果更加优雅的拟合方式。